42ZWWC80 Rated Power is 160W and Peak Torque is 3444.98mN.m.
In a mobile environment, you can move left and right to see the contents (tables).
| Motor part number | 42ZWWC80 | ||||||
|---|---|---|---|---|---|---|---|
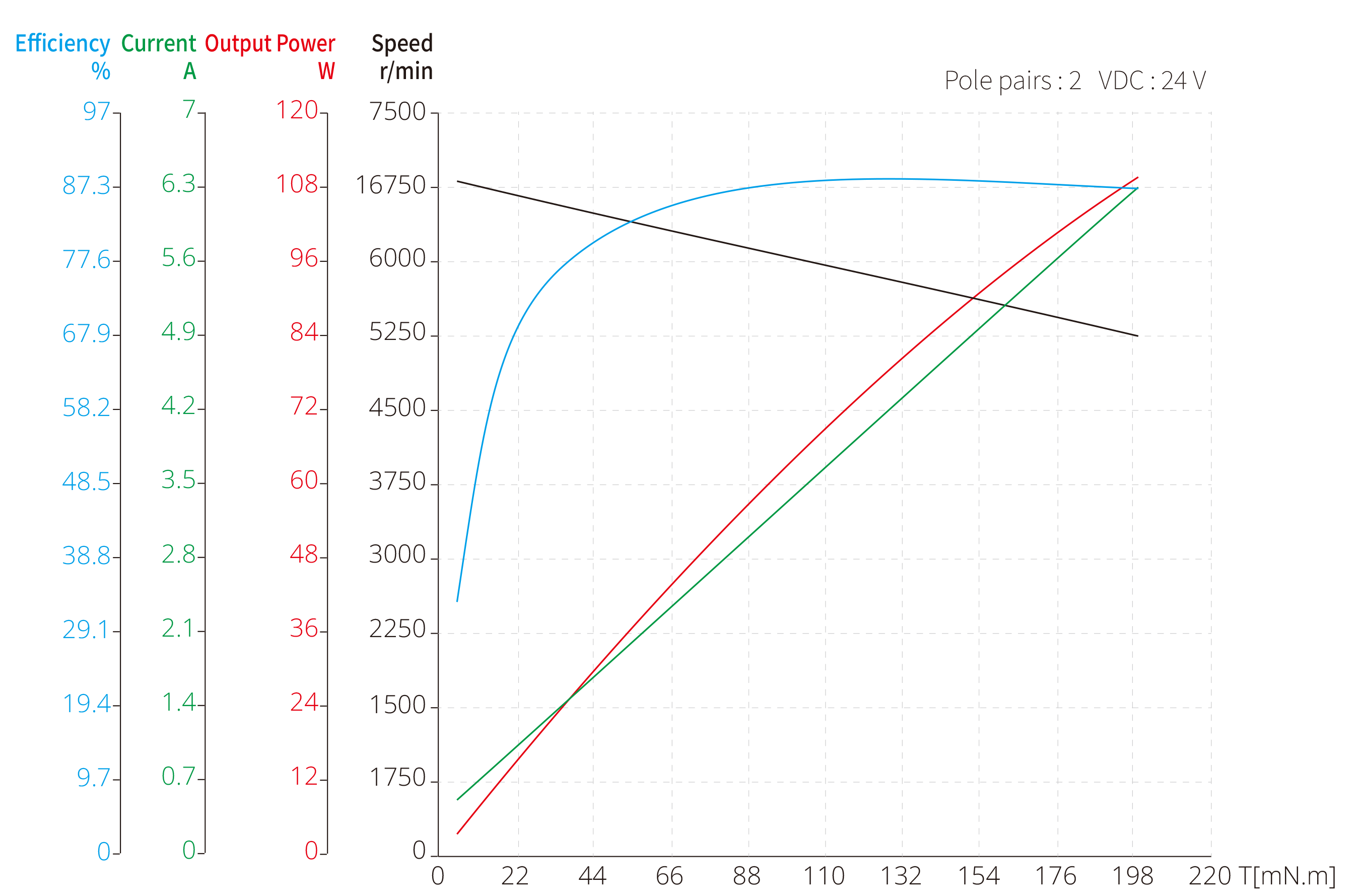
| Pole pairs | - | 1 | 1 | 1 | 1 | 2 | |
| Terminal resistance, Phase-Phase | Ω | 0.4 | 0.45 | 0.6 | 0.95 | 0.22 | |
| Terminal inductance, Phase-Phase | mH | 0.085 | 0.14 | 0.14 | 0.23 | 0.035 | |
| Winding connection method | - | Star connection | Star connection | Star connection | Star connection | Star connection | |
| Insulation class | - | B | B | B | B | B | |
| Duty type | - | S2 | S2 | S2 | S2 | S1 | |
| Feedback method | - | Hall sensors | Hall sensors | Hall sensors | Hall sensors | Hall sensors | |
| Commutation angle | - | 120° | 120° | 120° | 120° | 120° | |
|
Insulation strength (Withstand voltage) |
- | 500VAC/1KHz/1mA/1s | |||||
| Insulation resistance | - | 100 MΩ/500VDC | |||||
| Weight | g | 500 | 500 | 500 | 500 | 500 | |
| Rated voltage | V | 18 | 24 | 36 | 48 | 24 | |
| Rated power | W | 66 | 80 | 100 | 160 | 102 | |
| Rated torque | mN·m | 90 | 90 | 90 | 120 | 180 | |
| Rated speed | RPM | 6678 | 8346 | 11619 | 12200 | 5400 | |
| Rated current | A | 4.89 | 4.17 | 3.47 | 4.17 | 5.7 | |
| No load speed | RPM | 9000 | 11000 | 13000 | 13800 | 6800 | |
| No load current | A | 0.6 | 0.69 | 0.6 | 0.58 | 0.42 | |
| Motor efficiency | % | 75 | 80 | 80 | 80 | 87.9 | |
|
Noise (Ambient noise 20dB, test distance 1m) |
dB | <50 | <50 | <50 | <50 | <50 | |
| Thermal Resistance (No-load) | K/W | 0.43 | 0.50 | 0.67 | 0.26 | 0.41 | |
| Thermal Time Constant (No-load) | S | 900 | 1620 | 2040 | 2040 | 1340 | |
| Ambient temperature | ℃ | 23.1 | 23.5 | 23 | 23 | 22.6 | |
| Max winding temperature (No-load) | ℃ | 51.5 | 63.7 | 90 | 90 | 72.1 | |
| Torque constant | mN·m/A | 18.41 | 21.6 | 25.92 | 28.8 | 31.58 | |
| Back-EMF constant - peak value | V/Krpm | 2.73 | 3.20 | 3.84 | 4.26 | 4.68 | |
| Back-EMF constant - effective value | V/Krpm | 1.93 | 2.26 | 2.71 | 3.02 | 3.31 | |
| Peak torque | mN·m | 828.41 | 1152 | 1555.2 | 1455.16 | 3444.98 | |
| Peak current | A | 45 | 53 | 60 | 51 | 109 | |
| Rotor inertia | g·cm² | 96.3 | 96.3 | 96.3 | 96.3 | 96.3 | |
| Mechanical time constant | ms | 11.37 | 9.29 | 8.60 | 11.03 | 2.12 | |
| End bell | - | Stainless steel | |||||
| Bearing | - | Deep groove ball bearing | |||||
| Magnet | - | Sinter NdFeB | |||||
| Rotation shaft | - | Carbon steel | |||||
In a mobile environment, you can move left and right to see the contents (tables).
| Stage | - | Stage 1 | Stage 2 | Stage 3 | Stage 4 |
|---|---|---|---|---|---|
| Gear ratio | X : 1 | 3.9, 5.3 | 16, 21, 28 | 62, 83, 111, 150 | 243, 326, 439, 590, 794 |
| Max. backlash | ° | 0.3 | 0.4 | 0.5 | 0.6 |
| Max. continuous output power | W | 480 | 200 | 85 | 20 |
| Max. peak output power | W | 600 | 250 | 106 | 25 |
| Max. continuous input speed | rpm | 6000 | 6000 | 6000 | 6000 |
| Max. peak input speed | rpm | 7500 | 7500 | 7500 | 7500 |
| Max. continuous torque | N.m | 3.0 | 7.5 | 15 | 15 |
| Max. peak torque | N.m | 4.5 | 11.3 | 22.5 | 22.5 |
| Max. efficiency | % | 90 | 81 | 72 | 64 |
| Weight | g | 252 | 405 | 476 | 544 |
| Gearbox length L | mm | 36.1 | 54.9 | 63.6 | 72.4 |